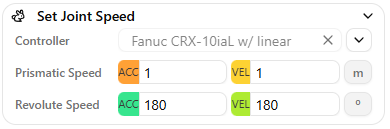
Set joint speed
Configure joint speed and acceleration limits.
The Set Joint Speed instruction defines angular velocity and acceleration limits for an articulated body's joints.
This instruction has three parameters:
- Controller
- Angular velocity
- Angular acceleration
These settings are used whenever Move Joints is executed, and whenever Move to Target runs in joint space.
Controller
The Articulation Controller whose joint speed and acceleration parameters you want to set.
Angular velocity
Joints' angular velocity in deg/s for revolute joints and m/s for prismatic joints.
Angular acceleration
Joints' angular acceleration in deg/s^2 for revolute joints and m/s^2 for prismatic joints.
Warning
If an articulated body includes both prismatic and revolute joints, the Set Joint Speed instruction lets you configure velocity and acceleration for both joint types.