Move joints
Move individual joints of an articulated chain.
The Move Joints instruction moves individual joints of an articulated chain.
This instruction has three main parameters:
- Controller
- Joint target value
- Relative
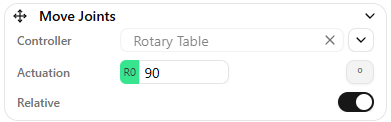
Controller
As with Move to Target, this must reference the articulated chain you want to move.
Joint target value
The Joint target value is the absolute value you want to set each joint to in a program step. Only two joint types appear:
- Revolute: value measured in degrees
- Prismatic: value measured in meters
Warning
Joint values appear in the same order as your joint tree.
Relative
The Relative parameter configures the instruction as relative, meaning the values you set are added to each joint's current position.
If Relative is disabled, the instruction performs an absolute move and each joint moves to the exact value set in Joint target value.